Abstract
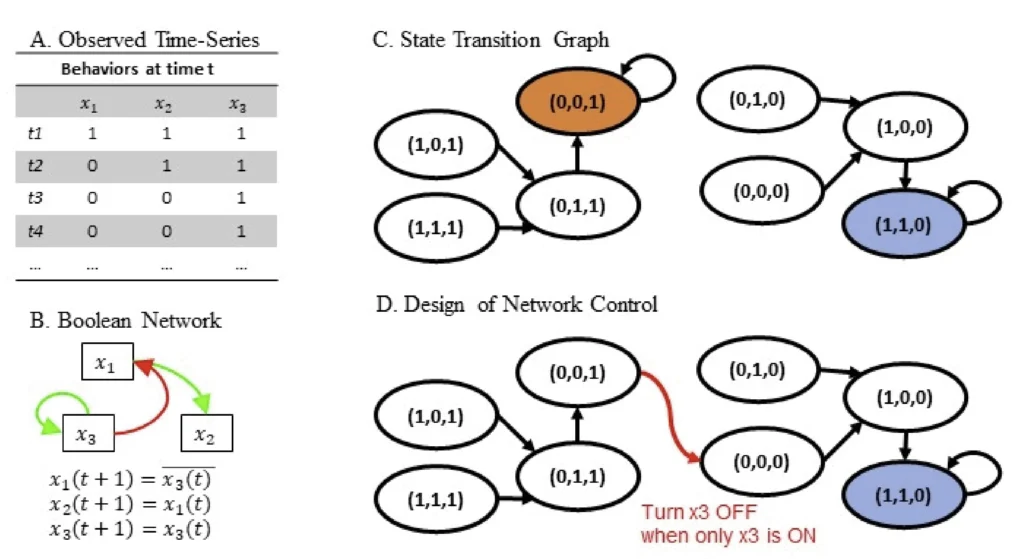
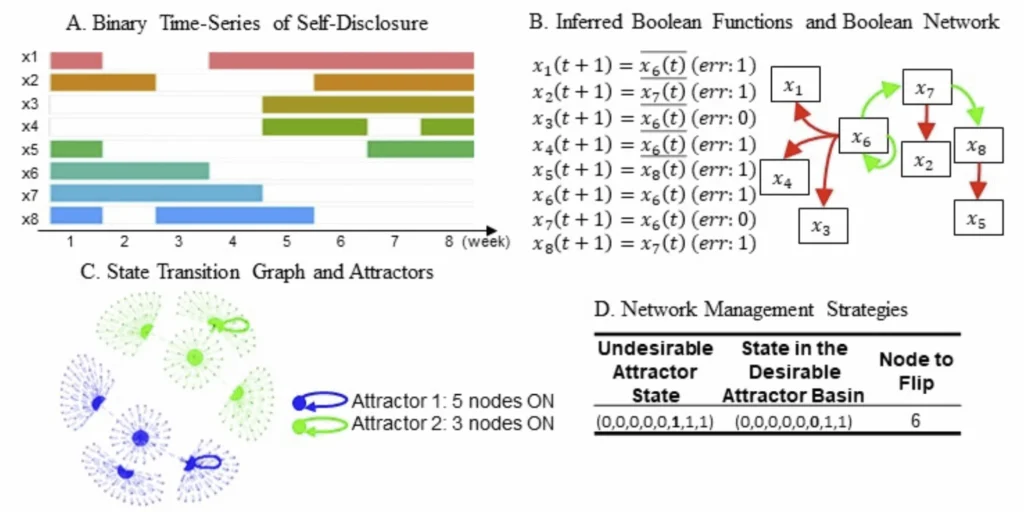
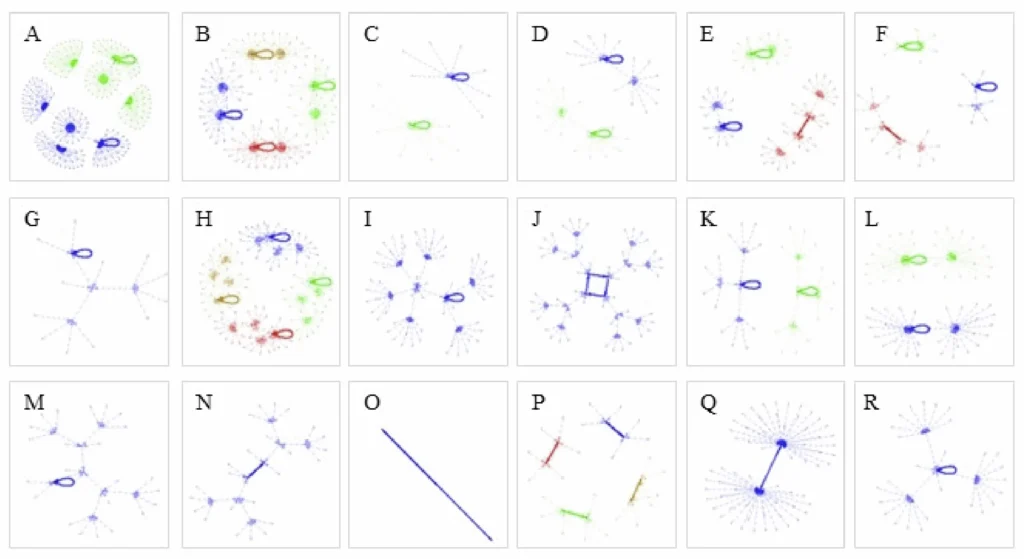
Social influence processes can induce desired or undesired behavior change in individual members of a group. Empirical modeling of group processes and the design of network-based interventions meant to promote desired behavior change is somewhat limited because the models often assume that the social influence is assimilative only and that the networks are not fully connected. We introduce a Boolean network method that addresses these two limitations. In line with dynamical systems principles, temporal changes in group members’ behavior are modeled as a Boolean network that also allows for application of control theory design of group management strategies that might direct the groups towards desired behavior. To illustrate the utility of the method for psychology, we apply the Boolean network method to empirical data of individuals’ self-disclosure behavior in multi-week therapy groups (N = 135, 18 groups, T = 10 ∼ 16 weeks). Empirical results provide description of each group member’s pattern of self-disclosure and social influence and identification of group-specific network control strategies that would elicit self-disclosure from the majority of the group. Of the 18 group models, 16 included both assimilative and repulsive social influence. Useful control strategies were not needed for 10 already well-functioning groups, were identified for 6 groups, and were not available for 2 groups. The findings illustrate the utility of the Boolean network method for modeling the simultaneous existence of assimilative and repulsive social influence processes in small groups, and developing strategies that may direct groups toward desired states without manipulating social ties.
Editor Curated
Key Takeaways
- This study introduces a Boolean network method to model the temporal dynamics of behavior change in groups, offering a new way to understand and predict how social influence processes unfold over time.
- Unlike previous models, this approach accounts for both assimilative and non-assimilative social influence and can be applied to fully connected networks, addressing key limitations in existing research.
- By applying principles of structural control, the method provides a framework for designing targeted network-based interventions to effectively steer a group's behavior toward a desired state (e.g., promoting healthy habits).
Keywords: